SQLITE NOT INSTALLED
Инженеры сумели создать крошечных насекомоподобных роботов, но программное обеспечение, способное наделить их автономностью, пока что представляет проблему. Группа исследователей в Корнельском университете экспериментирует с новым подходом к программированию, имитируя работу мозга насекомого.
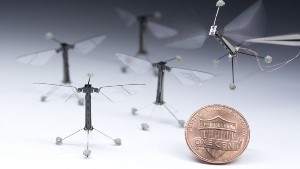
Подпись к изображению: RoboBees (РобоПчёлы), созданные коллективом Harvard Microrobotics Lab, имеют размах крыльев 3 сантиметра и весят 80 миллиграмм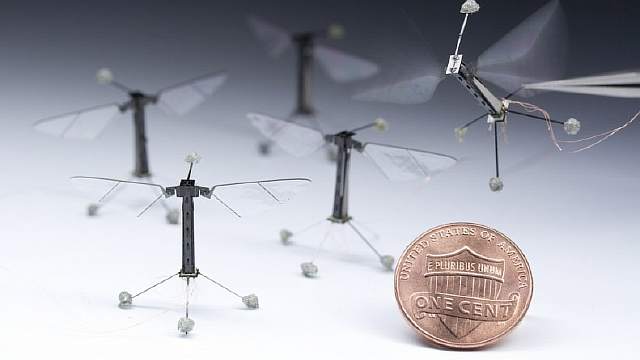
Вычислительная мощность, необходимая роботу-насекомому для того, чтобы распознать порыв ветра с помощью похожих на волоски микроскопических датчиков, расположенных на их крыльях, и скорректировать свой полёт с целью сесть на раскачивающийся цветок — потребовала бы нести на себе вычислитель размером с персональный компьютер. Сильвиа Феррари, профессор аэрокосмического инжиниринга и директор Лаборатории разумных систем, представляет нейроморфный компьютер как способ уменьшить размер компьютера для робота-насекомого.
В отличие от традиционных микросхем, работающих с двоичным кодом (последовательностями из нулей и единиц), нейроморфные чипы обрабатывают всплески напряжения, которые запускают в действие сложные реакции — так же, как действуют нейроны мозга. Лаборатория Феррари разрабатывает новый класс сенсорных и управляющих алгоритмов, основанных на событиях. Эти алгоритмы имитируют нейронную активность и могут быть выполнены на нейроморфных микропроцессорах. Такие процессоры требуют значительно меньше энергии, чем традиционные, что позволяет достичь бОльшей вычислительной плотности.
Лаборатория Феррари объединила усилия с Гарвардской лабораторией микроробототехники, которая создала RoboBee — летательный аппарат весом 80 миллиграмм, снабжённый датчиками изображения, оптического потока и перемещения. Пока что этот робот привязан к источнику питания, и учёные работают над созданием портативного источника, способного устранить это ограничение. Алгоритмы Корнельской группы сделают RoboBee более автономным и адаптируемым к сложному окружению, при этом не увеличивая его вес.
Говорит профессор Феррари: «Порыв ветра привел бы к потере управления крошечным роботом. Мы создаём датчики и алгоритмы, позволяющие избежать крушения, а в случае такового — выжить и продолжить полёт. Для этого недостаточно только опираться на результаты предварительного моделирования, и мы хотим создать самообучающиеся контроллеры, способные адаптироваться к любой ситуации.»
Чтобы ускорить разработку событийных алгоритмов, аспирант Тэйлор Клоусон, сотрудник лаборатории Феррари, создал виртуальный тренажёр. Основанный на реальной физике тренажёр эмулирует RoboBee и воздействие на него порывов ветра. Модель способна точно предсказывать движение RoboBee в сложных условиях.
«Компьютерное моделирование используется как для тестировании алгоритмов, так и при их создании, — говорит Клоусон, участник разработки автономной системы управления полётом для робота-насекомого, с применением основанной на реальной биологии нейронной сети. — Эта сеть способна обучаться в реальном времени, компенсируя производственные отклонения в параметрах экземпляров устройств — такие отклонения значительно усложняют управление.»
По словам Феррари, кроме достижения большей автономности и устойчивости, её лаборатория планирует снабдить RoboBee новыми микроскопическими устройствами, такими как видеокамера, тактильные усики, контактными датчиками на лапках и сенсорами воздушного потока, которые выглядят как крохотные волоски.
Устройство, которое определённо ощутит положительное влияние RoboBee — четырёхногий «Гарвардский Странствующий Микроробот», длиной 17 мм и весом менее трёх грамм. Он развивает скорость 44 сантиметра в секунду, а команда Феррари разрабатывает событийный алгоритм, который добавит к скорости — проворство.