
SQLITE NOT INSTALLED
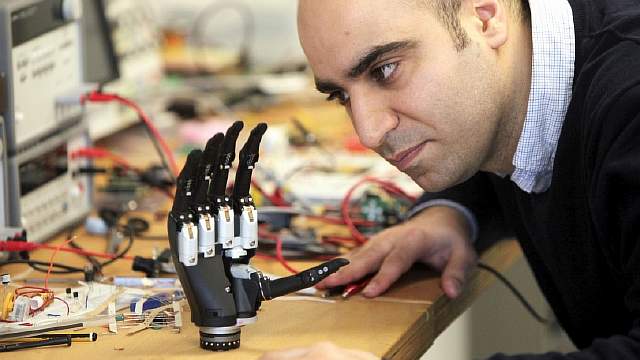
Несмотря на то, что мы уже начали подключать протезы непосредственно к периферической нервной системе, многие обычные протезы рук по-прежнему весьма неуклюжи и управляются с помощью миоэлектрических сигналов, считываемых с поверхности культи. «Интуитивная» рука, разработанная доктором Кианушем Назарпуром, старшим преподавателем кафедры биомедицинской инженерии университета Ньюкасла, основана на ином подходе. Она использует камеру и компьютерное зрение, чтобы распознавать объекты, находящиеся в пределах досягаемости, и соответственно корректировать свои действия.
«Главным барьером для протезов конечностей является их оперативность», — написал доктор Назарпур в своем исследовании, опубликованном в Journal of Neural Engineering. Даже самые ультрасовременные протезы, такие как рука известного инженера Дина Камена, движется неприемлемо медленно по сравнению со своим биологическим конкурентом. Однако, за счет объединения компьютерного зрения и внешней обработки данных, интуитивная рука способна реагировать в течение тысячных долей секунды. «Пользователь может взять чашку или печенье, для чего ему достаточно лишь бросить быстрый взгляд в нужном направлении», — добавил доктор Назарпур.
Исследовательская группа также применила нейронные сети, чтобы натренировать руку распознавать находящиеся поблизости предметы и подбирать соответствующий способ их захвата. Любопытно, что инженеры не «натаскивали» свою систему на конкретные объекты. «Компьютер распознает предметы и группирует их в соответствии с типом захвата, который рука должна выполнить, чтобы успешно взять его, – рассказал Газал Газеи, докторант из университета Ньюкасла, который участвовал в разработке искусственного интеллекта руки. – Именно это позволяет руке аккуратно приблизиться и поднять предмет, который она никогда прежде не видела, что является огромным шагом вперед в развитии бионических конечностей». В конце концов рука осуществляет четыре уникальных типа захвата: ладонь в нейтральном положении (удерживается бутылка с пивом), обратный хват (удерживается пульт дистанционного управления), «тренога» (удерживается шар для боулинга) и «щепотка» (в комментариях не нуждается).
Впрочем, эта система является лишь промежуточным решением. Базируясь на достигнутом, исследовательская группа рассчитывает усовершенствовать свою руку и интегрировать ее непосредственно в нервную систему, возможно, через нервные окончания. В этом случае рука сможет ощущать давление и температуру, а также передавать эти данные непосредственно в мозг хозяина.