SQLITE NOT INSTALLED
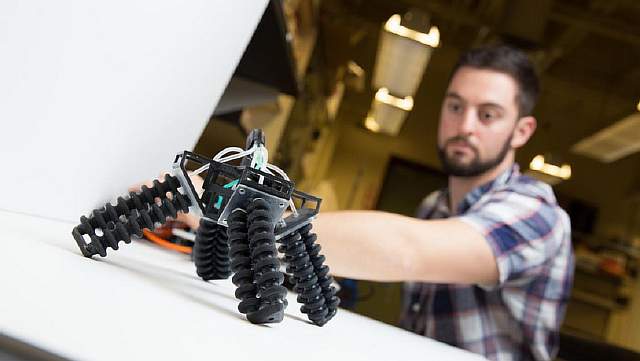
Корпус и конечности мягких роботов обычно легко гнутся, что позволяет аппарату проникать в самые тесные места. Однако если робот предназначен для поиска и разведки, он также должен уметь передвигаться по пересечённой местности. Командой инженеров Калифорнийского университета в Сан-Диего был создан мягкий робот, который может справиться с этой задачей. Специалисты создали механизм с четырьмя ногами, и он не только проникает в узкие места, но также способен преодолевать препятствия и перемещаться по песку, гальке, камням и даже наклонным поверхностям. Робот был создан с помощью 3D-принтера, который комбинирует мягкие и твёрдые материалы при печати.
Робот передвигается благодаря насосу, который перекачивает воздух по надувным полым ногам механизма. К примеру, если одна нога наполнена воздухом, а другие – нет, то надутая нога сгибается. Также робот легко переходит от ползанья к хождению и наоборот. На данном этапе разработки механизм соединён с панелью управления и воздушным насосом, но со временем создатели устройства планируют представить уменьшенную версию робота, которая будет передвигаться свободно.
На видео мягкий робот проходит «ходовые испытания».
Очень интересно! Спасибо за новость, такие разработки действительно могут спасти много жизней.